我院在机器人用柔性多维力传感器领域取得重要进展
发布时间:2022-03-21 发布人:许高斌
人类皮肤受益于指纹结构和各种机械受体,可以轻易地感受到压力和摩擦力。运用新型力学传感技术提升机器人的触觉智能,使其抓握感知能力达到类似于人手触觉水平,是机器人基础研究领域的一项重要内容。近日,我院刘平副教授提出了一种用于检测法向力与切向力的谐振式柔性触觉传感器,装备了该传感器的灵巧手能够在抓取过程中对材质进行识别,准确率达92.5%。相关成果以“Flexible and wireless normal-tangential force sensor based on resonant mechanism for robotic gripping applications”为题发表于工程领域知名期刊Advanced Materials Technologies(中科院二区,IF=7.84),我院研究生汪鹏飞为论文第一作者,合肥工业大学为论文第一单位。

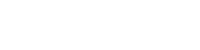
该传感器基于谐振式的工作原理,避免了复杂的多电极结构与布线,通过无线收集到的单通道输入反射系数频谱就能对正交的机械信息进行解耦。其对法向力以及切向力的感知范围为0-200kPa与0-50kPa,对应的灵敏度分别为-0.19 MHz kPa-1与-0.031 dB kPa-1。研究工作得到了中央高校基本科研业务费,浙江省“尖兵”“领雁”研发攻关计划以及浙江省重点研发项目的支持。
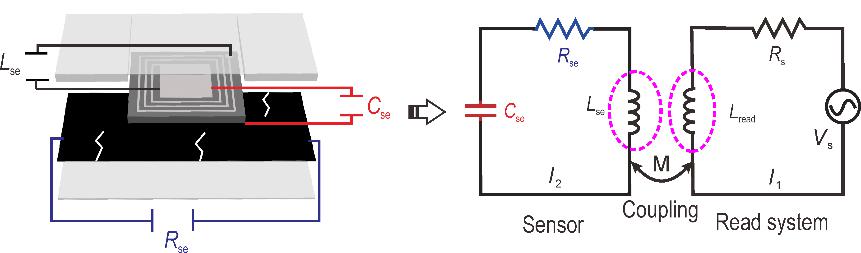
图1 柔性多维力传感器结构与原理
图2 材质识别结果
文献链接: https://doi.org/10.1002/admt.202101385