近日,我院集成电路设计中心解光军教授、张章教授与上海交通大学等单位合作,在国际顶级期刊《Science》子刊《Science Advances》上发表题为《Perovskite retinomorphic image sensor for embodied intelligent vision》的研究成果(DOI:10.1126/sciadv.ads2834)。该团队成功研发出全球首款基于钙钛矿材料的大规模视网膜形态计算系统,为下一代外骨骼机器人及智能视觉应用提供了颠覆性技术解决方案。
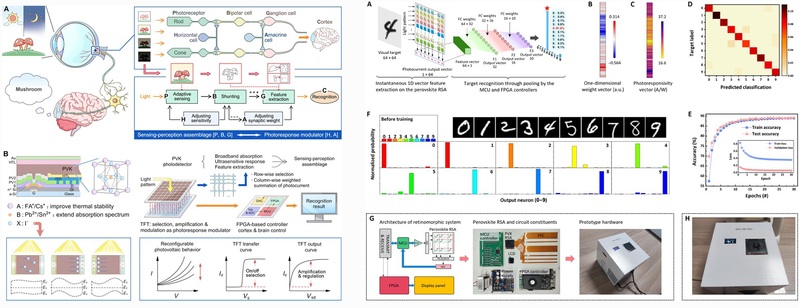
突破传统瓶颈,实现从材料革新到算法创新。传统硅基光探测器虽具备宽光谱响应能力,但其固定光响应特性难以满足实时环境感知与动态决策需求。团队创新性地采用有机金属卤化物钙钛矿材料,结合窄带隙(NBG)技术,开发出4096像素的超高灵敏度图像传感器阵列。该材料不仅具备紫外-可见-近红外的全波段吸收能力,更通过离子迁移实现光响应可重构性,解决了暗光环境成像质量差、图像对比度低等长期难题。传感器阵列每个像素均独立可控,其光灵敏度是传统器件的数百倍,且支持硬件级突触权重更新,相当于为机器人装上了‘壁虎的夜视眼’和‘青蛙的动态捕捉神经’。
全硬件实现:从“看见”到“决策”的瞬时闭环。研究团队进一步提出“一维特征提取(ODFE)算法”,首次将时空信息分解与神经网络计算直接映射至传感器硬件层面,彻底摆脱了传统卷积神经网络(CNN)对后端算力的依赖。实验表明,搭载该系统的外骨骼机器人可在复杂光照条件下,于毫秒级时间内完成目标识别、路径规划与运动决策,较现有技术效率提升超90%。此项技术突破为智能假肢、康复外骨骼等助残设备提供了全新可能。未来,残障人士可通过搭载该系统的机器人,实时感知环境细节,精准完成抓取、避障等高难度动作,真正实现“感知-决策-行动”的无缝衔接。下一步将优化系统的小型化与低功耗设计,并探索其在无人驾驶、工业检测等领域的应用。此项技术突破为智能假肢、康复外骨骼等助残设备提供了全新可能。未来,残障人士可通过搭载该系统的机器人,实时感知环境细节,精准完成抓取、避障等高难度动作,真正实现“感知-决策-行动”的无缝衔接。下一步将优化系统的小型化与低功耗设计,并探索其在无人驾驶、工业检测等领域的应用。

本项目受到国家自然科学基金等资助,合肥工业大学为本文共同通讯单位,张章教授为本文共同通讯作者,本文作者还包括解光军教授,微电子学院硕士生倪神周、蒋择。
本文链接:https://www.science.org/doi/10.1126/sciadv.ads2834
(张章 文/图 刘梅 审核)